
考古RNN篇(上):一文搞懂pytorch RNN如何处理可变长批次训练
写在前面
笔者最近研究线性注意力时,突然发现此前了解过RNN网络,但是没有细究RNN具体如何堆叠,训练时如何并行等细节。因此本博客将讲解pytorch下torch.nn.RNN的使用方法,重点关注如下两块:
- RNN如何堆叠,
num_layers参数背后是什么结构,bidirectional参数的作用 - 对于可变序列输入来说,RNN如何进行batch训练
系列目录
- 考古RNN篇(上):一文搞懂pytorch RNN如何处理可变长批次训练———介绍RNN原理与处理可变长批次序列方法
- 考古RNN篇(下):如何用RNN网络进行序列预测———训练一个求序列和余数的RNN分类网络,以及一些调参小技巧
介绍RNN原理
先简单介绍下RNN的公式:
公式里面的关键变量:
:时间步 的输入向量 :时间步 的隐藏状态(hidden state) , , :就是模型的参数矩阵
笔者刚学RNN时一直弄不懂隐藏状态
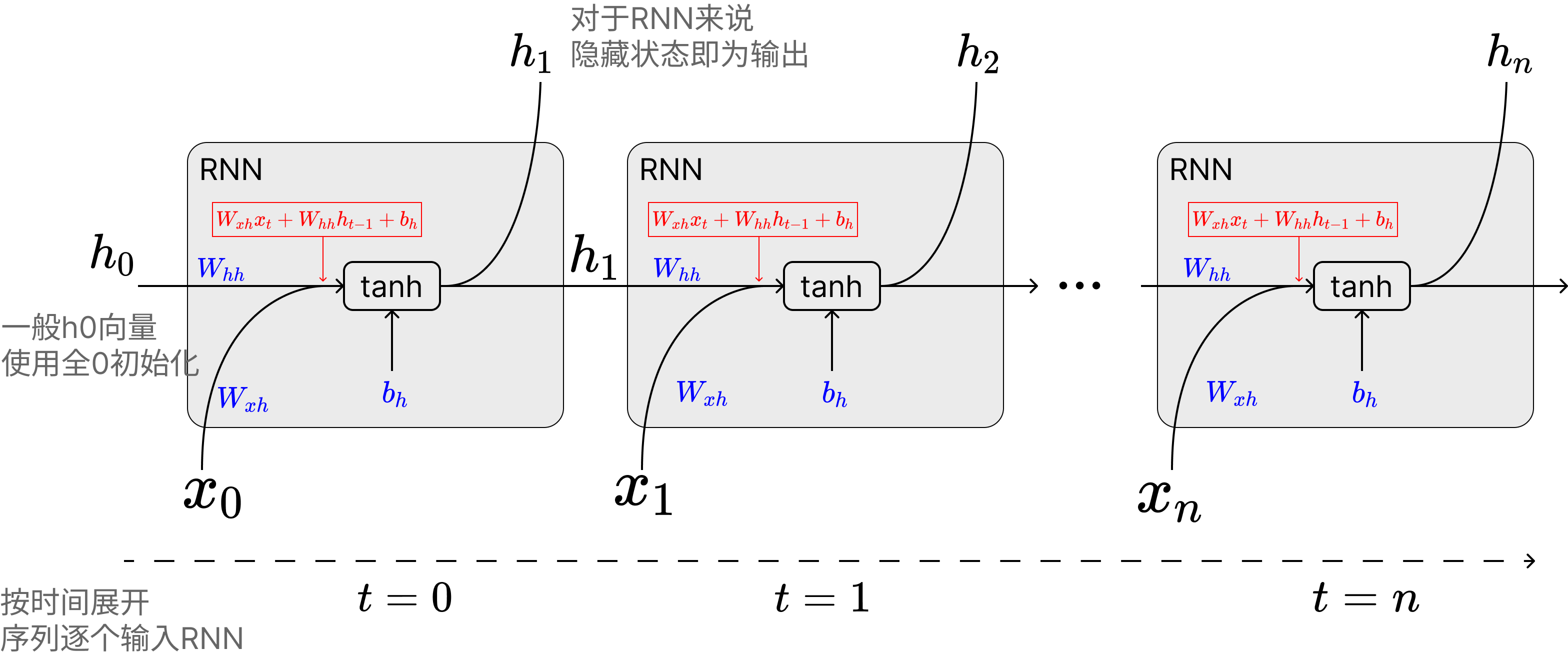
这里面重要的是对于RNN来说,隐变量直接输出作为RNN网络的输出,同时该输出与下一个序列token的输入相加,隐状态
pytorch官方实现的torch.nn.RNN模块支持输入如下参数
- input_size: 输入维度
- hidden_size: 隐藏层维度,历史无论输入多长序列,模型都会将其压缩到这个小的向量来表示
- num_layers: 多层RNN的层数,后面讲解
- nonlinearity: 非线性函数的选择,只支持输入
"tanh"和"relu"两种,想用sigmoid得自己想办法实现 - bias: 是否开启偏置,也就是上面公式中的
- batch_first: 是否为batchu输入,跟input_size的形状有关
- dropout: 是否给输出增加dropout
- bidirectional: 是否为双向RNN,后面讲解
一个典型的使用案例是这样:
rnn = torch.nn.RNN(10, 20, 1) # 输入向量序列的维度为10维,隐藏层大小(也就是输出大小)为20维,RNN堆叠层数是1
input = torch.randn(5, 3, 10) # 序列长度为5,batch大小为3的一个向量序列,每个向量维度为5
h0 = None # 默认不需要输入第一个隐藏状态,不输入的话模型会自动初始化一个全0的隐藏向量
output, hn = rnn(input, h0) # 输出
print(output.shape) # torch.Size([5, 3, 20]) output中包含所有的隐藏状态:h_1,h_2,...,h_n
print(hn.shape) # torch.Size([1, 3, 20]) hn中仅包含最后一层的隐藏状态:h_n这里也推荐读者看一下pytorch官方对于RNN的模块的介绍文档:
那接下来我们就介绍下num_layers参数的作用和bidirectional参数的作用。
多层RNN的堆叠
pytorch官方文档中对于num_layers参数的介绍如下:
num_layers – Number of recurrent layers. E.g., setting num_layers=2 would mean stacking two RNNs together to form a stacked RNN, with the second RNN taking in outputs of the first RNN and computing the final results. Default: 1
用Qwen3翻译过来就是:
num_layers —— 循环层的数量。例如,设置 num_layers=2 表示将两个 RNN 堆叠在一起形成一个堆叠 RNN,其中第二个 RNN 接收第一个 RNN 的输出并计算最终结果。默认值:1
实际上讲解的也非常不清楚,笔者查阅了不少博客,以及看官方的案例代码,最终理解了所谓的Stacked RNN就是如下这么一个结构:
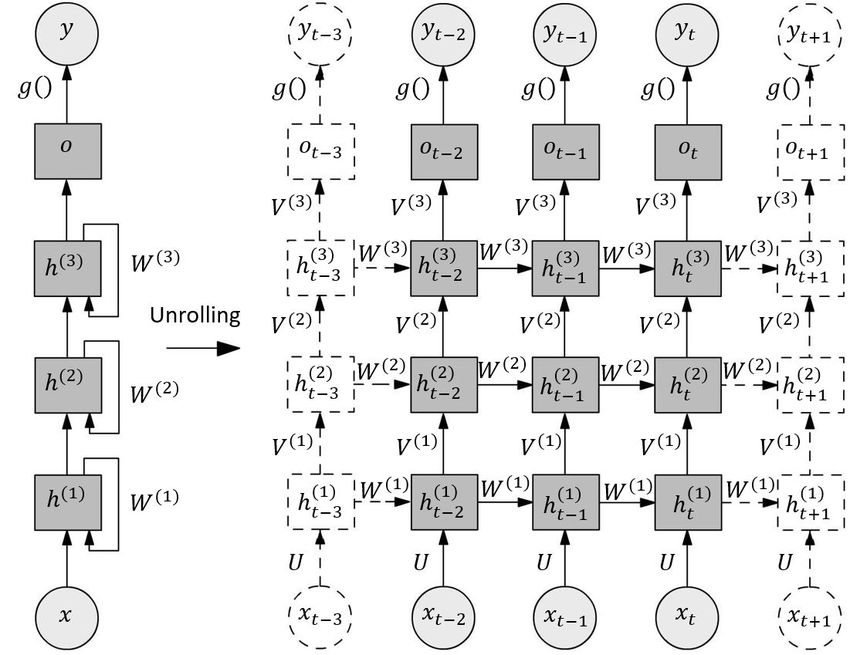
笔者也贴出对于多层堆叠RNN(Stacked RNN)的计算代码供读者参考(代码来自pytorch官方文档):
# Efficient implementation equivalent to the following with bidirectional=False
rnn = nn.RNN(input_size, hidden_size, num_layers)
params = dict(rnn.named_parameters())
def forward(x, hx=None, batch_first=False):
if batch_first:
x = x.transpose(0, 1)
seq_len, batch_size, _ = x.size()
if hx is None:
hx = torch.zeros(rnn.num_layers, batch_size, rnn.hidden_size)
h_t_minus_1 = hx.clone()
h_t = hx.clone()
output = []
for t in range(seq_len):
for layer in range(rnn.num_layers):
input_t = x[t] if layer == 0 else h_t[layer - 1]
h_t[layer] = torch.tanh(
input_t @ params[f"weight_ih_l{layer}"].T
+ h_t_minus_1[layer] @ params[f"weight_hh_l{layer}"].T
+ params[f"bias_hh_l{layer}"]
+ params[f"bias_ih_l{layer}"]
)
output.append(h_t[-1].clone())
h_t_minus_1 = h_t.clone()
output = torch.stack(output)
if batch_first:
output = output.transpose(0, 1)
return output, h_t通过上面的代码,可以理解,output和h_t的关系:
- output表示,随着向量序列中各个向量的输入,每个向量对应的最后一层隐藏状态的变化,所以形状是
(序列长度, batch数, 隐藏状态维度) - h_t表示的是整个序列输入完,所有层的最后一个隐藏状态,所以形状是
(层数, batch数, 隐藏状态维度)
双向RNN
双向RNN比较好理解,用直白的话说,就是为了让模型即能够从前往后理解序列,又能从后往前理解序列(有点像Bert和GPT的差异)。因此我弄两个相同的RNN,把序列正着输入到第一个RNN获得隐藏状态,再倒着输入第二个RNN获得隐藏状态。开启的方式是另bidirectional变量为True。
示意图如下:
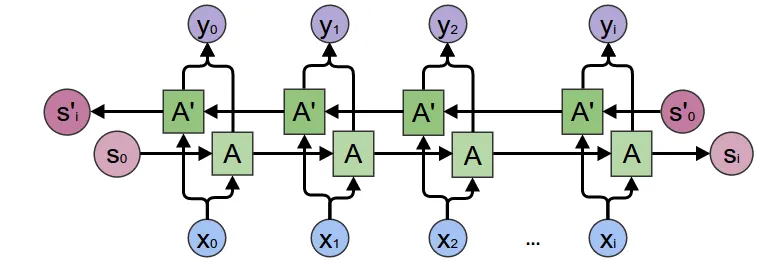
当然这里注意两个细节:
- 开启
bidirectional后模型会直接生成两份RNN参数,所以RNN模型参数会大一倍 output和h_n都会给两份(两个RNN各一份),上面参考图画的有点问题在于最后看起来好像是正向和反向RNN的隐藏状态向加,实际上torch实现的RNN是直接把正向反向RNN的隐藏状态都返回出来的。
基于RNN网络的序列处理模型设计
由于RNN模型结构自身的梯度爆炸问题等问题,基于RNN的网络显著少于LSTM。当然,无论是LSTM还是RNN、乃至transformers,对于序列处理的模型可以简单分为下图这几个类:
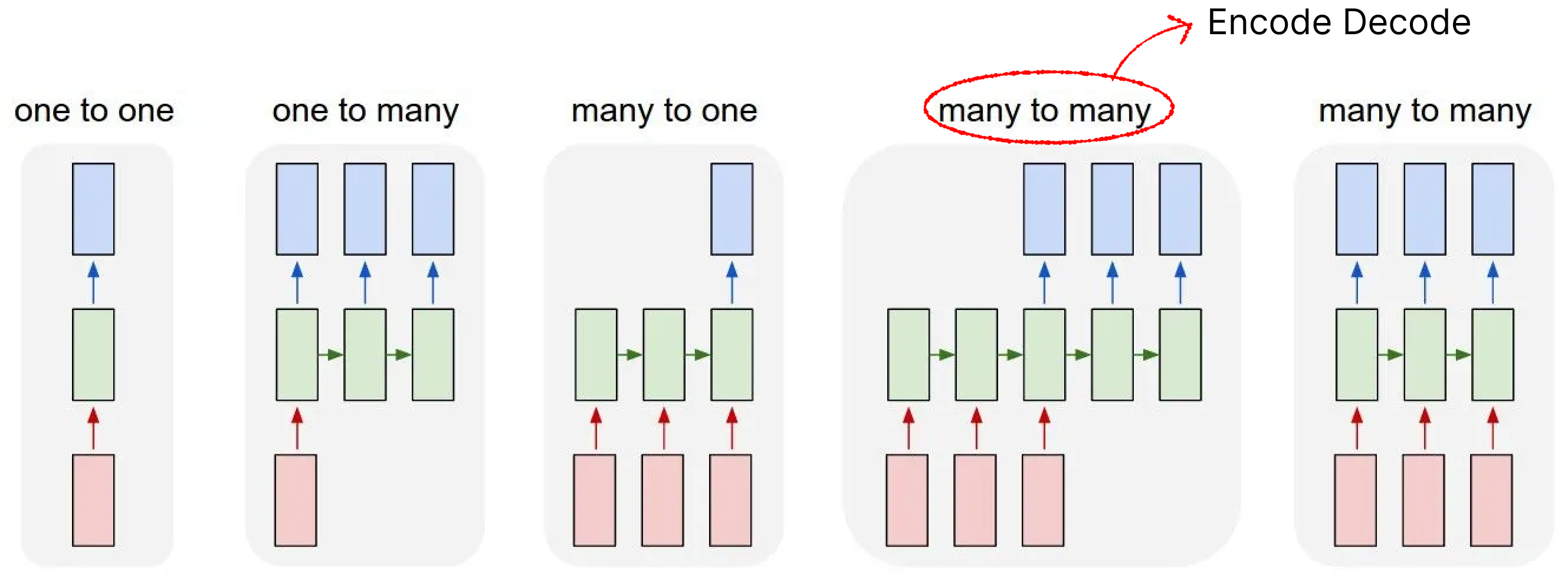
上图绿色部分其实替换成LSTM、RNN、Transformers逻辑都是一样的。下面列举一个各个网络的作用:
- one to one: 一般没这个结构😂,跟全连接没区别了
- one to many: 早期的图像-文本模型会是这个结构,或者老一点的文本生成模型
- many to many(encode-decode): 早期非常流行的NLP网络架构,一般用于文本生成、翻译、序列预测等任务,很多LSTM都是这个架构(Bert可以勉强归入到这个架构,虽然不完全正确,但是设计思想比较近)
- many to many: 这个架构笔者见的少,但是一些翻译任务,序列特征提取(比如实时语音转文本)会使用类似的架构。包括近年流行的线性注意力模型可以不严谨的归类到这个
当然RNN本身的建模能力并不是特别强,所以流行的还是encode-decode架构,或者做一些简单的预测、分类任务使用many to one架构,本文后面的教程就是基于many to one架构。
梯度消失和爆炸问题:https://en.wikipedia.org/wiki/Vanishing_gradient_problem
当然RNN结构本身还有并行效率低,长程理解能力差等问题,关于并行效率将在后面分析
RNN对于可变长序列的处理问题
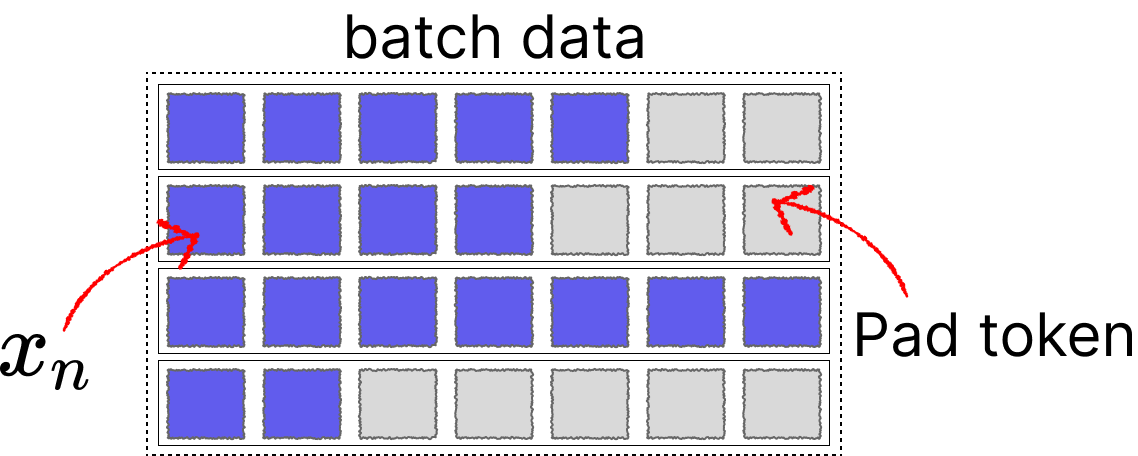
为了提升显卡的计算效率,以及梯度方向的准确性,训练一般是将一批序列打包成一个batch进行的,但是这会有一个问题。就是对于文本分类等任务,序列一般是长度不一的。
对于多个不同长度的序列x,我们通常使用padding的办法来将其填充到特定长度,再输入到网络中。
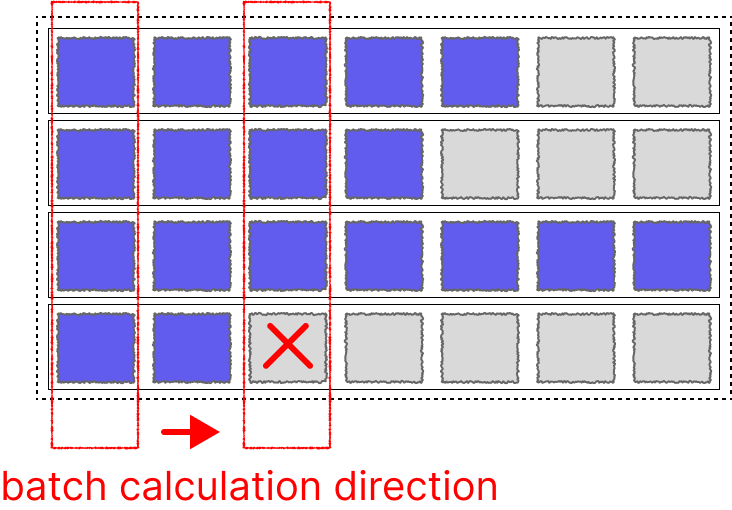
对于Transformers来说这个问题比较好解决,我们可以通过增加attention mask实现并行。但是对于LSTM、RNN这种网络。由隐藏状态
好在pytorch工程师也考虑了这一点,弄了两个工具函数专门来帮助处理
- pack_padded_sequence 把填充后的batch和序列长度合成一个长序列:(seq,batch, dim) -> (seq*batch, dim)
- pad_packed_sequence 和上面的函数反过来,通常用于处理RNN的output结果:(seq*batch, dim) -> (seq,batch, dim)
这样一定程度上能实现并行计算,不过并行计算的效率自然还是很低(这也是RNN没法做大的原因之一)。不过终归是可以利用向量计算+流水线处理一定程度上加速了。
下面是pack_padded_sequence函数知乎大神画的示意图,我直接拿来用了:
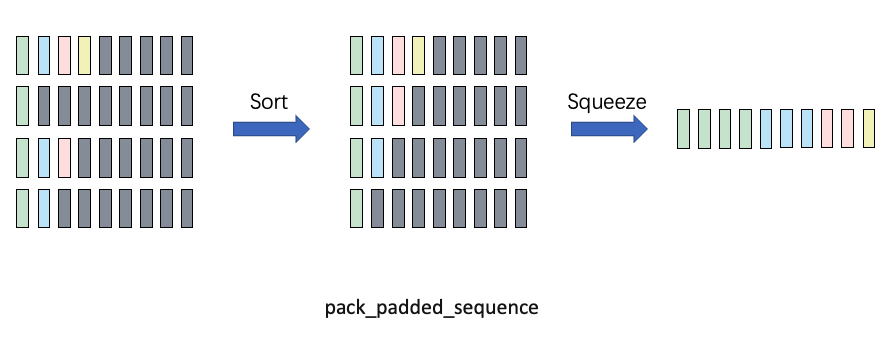
这里要说明下,pack_padded_sequence有一个参数enforce_sorted是默认开启的,这个意思是要求batch里的序列必须是从长到短排列的(为了在GPU上可以减少中断的计算)。然而实际上我们并不会在训练代码时每次对一个batch的数据排序,这里给指定为false就行,开不开启只影响模型导出onnx的行为。一般来说我们指定为false让pytorch自己处理即可。
有关pack_padded_sequence和pad_packed_sequence的使用案例代码如下(网上好多都是错的T_T,包括外网stack over flow上一些,大家可以参考这个笔者校对过的代码)
import torch
import torch.nn as nn
from torch.autograd import Variable
input_dim=2
batch_size = 3
max_length = 4
hidden_size = 2
n_layers =1
# container
batch_in = torch.zeros(
(
batch_size,
max_length,input_dim
)
)
# data
vec_1 = torch.FloatTensor([[1, 1.1], [2, 2.2], [0, 0], [0, 0]])
vec_2 = torch.FloatTensor([[[1, 1.1], [2, 2.2], [3, 3.3], [4, 4.4]]])
vec_3 = torch.FloatTensor([[[1, 1.1], [0, 0], [0, 0], [0, 0]]])
# print(batch_in[0].shape)
batch_in[0] = vec_1
batch_in[1] = vec_2
batch_in[2] = vec_3
batch_in = Variable(batch_in)
seq_lengths = [4,2,1,] # list of integers holding information about the batch size at each sequence step
# pack it
pack = torch.nn.utils.rnn.pack_padded_sequence(batch_in, seq_lengths, batch_first=True,enforce_sorted=False)
print(pack)
# PackedSequence(data=tensor([[1.0000, 1.1000],
# [1.0000, 1.1000],
# [1.0000, 1.1000],
# [2.0000, 2.2000],
# [2.0000, 2.2000],
# [0.0000, 0.0000],
# [0.0000, 0.0000]]), batch_sizes=tensor([3, 2, 1, 1]), sorted_indices=tensor([0, 1, 2]), unsorted_indices=tensor([0, 1, 2]))pack中会包含构建好的序列、batch大小信息(用于未来恢复)、以及排序信息。
那么对RNN进行批次前向传递和对ouput进行batch恢复的代码如下:
# initialize
rnn = nn.RNN(input_dim, hidden_size, n_layers, batch_first=True)
h0 = Variable(torch.zeros(n_layers, batch_size, hidden_size))
# forward
out, h_n = rnn(pack, h0)
# unpack
unpacked, unpacked_len = torch.nn.utils.rnn.pad_packed_sequence(out ,batch_first=True)
print(unpacked)
# tensor([[[ 0.6948, -0.4382],
# [ 0.5995, 0.0263],
# [ 0.7160, 0.0732],
# [ 0.7253, 0.1289]],
# [[ 0.6948, -0.4382],
# [ 0.5995, 0.0263],
# [ 0.0000, 0.0000],
# [ 0.0000, 0.0000]],
# [[ 0.6948, -0.4382],
# [ 0.0000, 0.0000],
# [ 0.0000, 0.0000],
# [ 0.0000, 0.0000]]], grad_fn=<IndexSelectBackward0>)这里还是放一下两个函数的官方文档链接,推荐大家读一下:
- pack_padded_sequence文档:https://docs.pytorch.org/docs/stable/generated/torch.nn.utils.rnn.pack_padded_sequence.html
- pad_packed_sequence文档:https://docs.pytorch.org/docs/stable/generated/torch.nn.utils.rnn.pad_packed_sequence.html
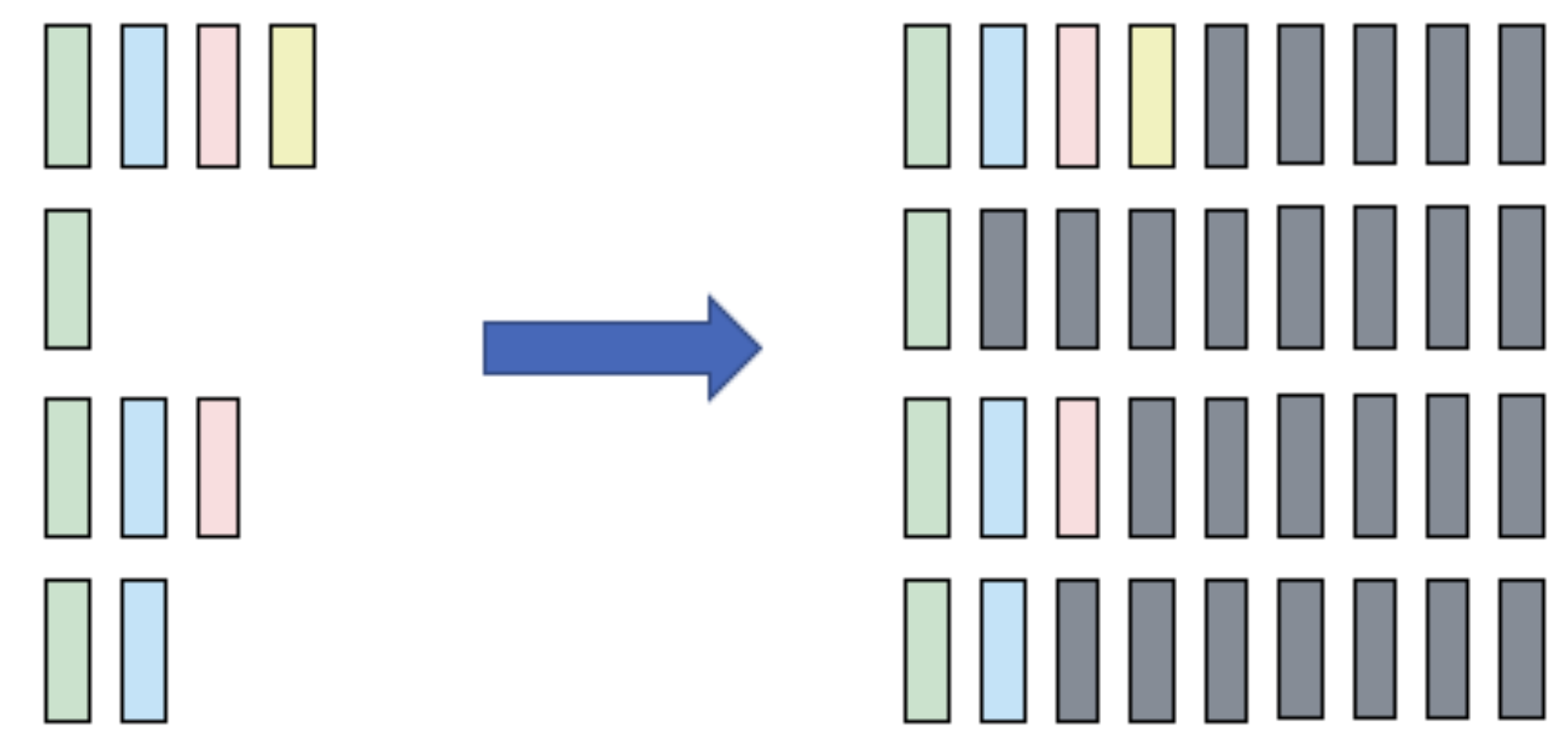
除了这两个函数外,还有一个经常会用到的函数pad_sequence,将数据由不同长度的tensor list自动填充成一个batch。这个函数通常用于数据预处理
下一篇会介绍下如何构建一个做序列分类的训练脚本。(可以在GitHub上找到README_next.md)