swanlab.Object3D
| 参数 | 描述 | | ------- | -------------------------------------------------------------------------------------------------------- | --- | | data | (Union[np.ndarray, str, Path]) 接收点云文件路径、numpy数组。Object3D类将判断接收的数据类型做相应的转换。 | | | caption | (str) 3D对象的标签。用于在实验看板中展示3D对象时进行标记。 |
介绍
对各种类型的点云数据做转换,以被swanlab.log()记录。
从文件/字典创建
示例文件
data.swanlab.pts.json:Google Drive下载
文件的格式为json,内容格式如下:
json
{
"points": [
[x1, y1, z1, r1, g1, b1],
[x2, y2, z2, r2, g2, b2],
...
],
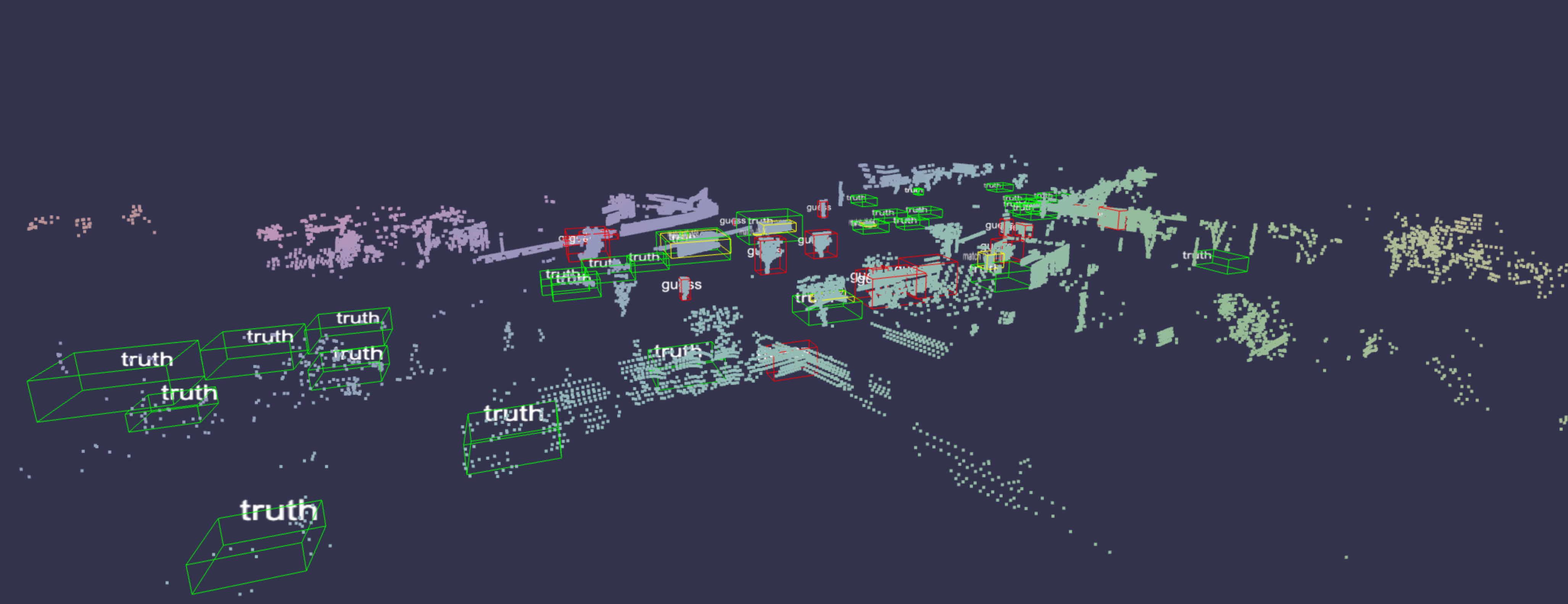
// (可选)检测框,用于点云检测等任务,会框住对应位置
"boxes": [
{
"color": [r, g, b],
"corners": [[x1,y1,z1], ..., [x8,y8,z8]],
// (可选)检测框的标签文本,会在视图中显示
"label": "class_name",
// (可选)置信度,会在视图中显示
"score": 0.95,
},
...
]
}json文件参数详细解释:
points:- 这是一个数组,用于存储3D点云数据。
- 每个元素都是一个包含6个数值的数组
[x, y, z, r, g, b],分别代表:x,y,z:点的三维坐标。r,g,b:点的颜色,分别代表红、绿、蓝三个通道的数值,通常取值范围为0-255。
boxes(可选):- 这是一个数组,用于存储3D检测框数据。
- 每个元素都是一个对象,代表一个检测框,包含以下字段:
color:检测框的颜色,[r, g, b]数组,代表红、绿、蓝三个通道的数值。corners:检测框的八个顶点坐标,[[x1, y1, z1], ..., [x8, y8, z8]]数组,每个元素是一个三维坐标[x, y, z]。label(可选):检测框的标签文本,字符串类型,用于在视图中显示检测框的类别。score(可选):检测框的置信度,数值类型,通常取值范围为0-1,用于表示检测框的可靠程度。
使用SwanLab从json文件中记录3D点云数据:
python
import swanlab
swanlab.init()
obj = swanlab.Object3D("data.swanlab.pts.json", caption="3d_point_cloud")
swanlab.log({"examples": obj})python
import swanlab
swanlab.init()
with open("data.swanlab.pts.json", "r") as f:
cloud_point = json.load(f)
obj = swanlab.Object3D.from_point_data(
points=cloud_point["points"],
boxes=cloud_point["boxes"],
caption="3d_point_cloud"
)
swanlab.log({"examples": obj})从numpy数组创建
python
import numpy as np
# Example 1: Create point cloud from coordinates
points_xyz = np.array([
[0, 0, 0], # Point1: x=0, y=0, z=0
[1, 1, 1], # Point2: x=1, y=1, z=1
[2, 0, 1] # Point3: x=2, y=0, z=1
])
cloud_xyz = swanlab.Object3D(points_xyz, caption="Basic XYZ Points")
swanlab.log({"examples": cloud_xyz})python
import numpy as np
# Example 2: Create point cloud with categories
points_xyzc = np.array([
[0, 0, 0, 0], # Point1: xyz + category 0
[1, 1, 1, 1], # Point2: xyz + category 1
[2, 0, 1, 2] # Point3: xyz + category 2
])
cloud_xyzc = swanlab.Object3D(points_xyzc, caption="Points with Categories")
swanlab.log({"examples": cloud_xyzc})python
import numpy as np
# Example 3: Create point cloud with RGB colors
points_xyzrgb = np.array([
[0, 0, 0, 255, 0, 0], # Point1: xyz + red
[1, 1, 1, 0, 255, 0], # Point2: xyz + green
[2, 0, 1, 0, 0, 255] # Point3: xyz + blue
])
cloud_xyzrgb = swanlab.Object3D(points_xyzrgb, caption="Colored Points")
swanlab.log({"examples": cloud_xyzrgb})单步记录多个点云
python
import swanlab
...
cloud1 = swanlab.Object3D(points1, caption="cloud1")
cloud2 = swanlab.Object3D(points2, caption="cloud2")
cloud3 = swanlab.Object3D(points3, caption="cloud3")
...
swanlab.log({"examples": [cloud1, cloud2, cloud3, ...]})