CIFAR10 Image Classification
INFO
Introduction to Image Classification and Machine Learning

Overview
CIFAR-10 is a classic image classification dataset comprising 60,000 32×32-pixel color images divided into 10 categories (e.g., airplane, automobile, bird, etc.), with 50,000 for training and 10,000 for testing.
CIFAR-10 is widely used for image classification tasks. The objective is to build a model that performs 10-class classification on input images, outputting probability scores for each category. Due to its low resolution, complex backgrounds, and limited data volume, this dataset is often employed to test model generalization and feature extraction capabilities, serving as a benchmark for deep learning beginners. Typical approaches include CNNs (e.g., ResNet, AlexNet) with data augmentation and cross-entropy loss optimization, achieving top accuracy above 95%. Its lightweight nature makes CIFAR-10 popular for education and research, spawning more complex variants like CIFAR-100.
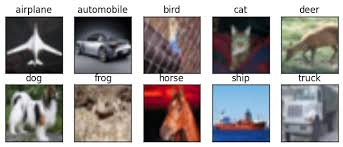
CIFAR-10 includes images from the following 10 classes:
- Airplane
- Automobile
- Bird
- Cat
- Deer
- Dog
- Frog
- Horse
- Ship
- Truck
This case study focuses on:
- Implementing, training, and evaluating a ResNet50 (Residual Neural Network) using
PyTorch. - Tracking hyperparameters, logging metrics, and visualizing training progress with
SwanLab.
Environment Setup
This example requires Python>=3.8. Ensure Python is installed on your system.
Dependencies:
torch
torchvision
swanlabQuick installation:
pip install torch torchvision swanlabFull Code
import os
import random
import numpy as np
import torch
from torch import nn, optim, utils
from torchvision.datasets import CIFAR10
from torchvision.transforms import ToTensor, Compose, Resize, Lambda
import swanlab
def set_seed(seed=42):
"""Set all random seeds for reproducibility."""
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
if torch.cuda.is_available():
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
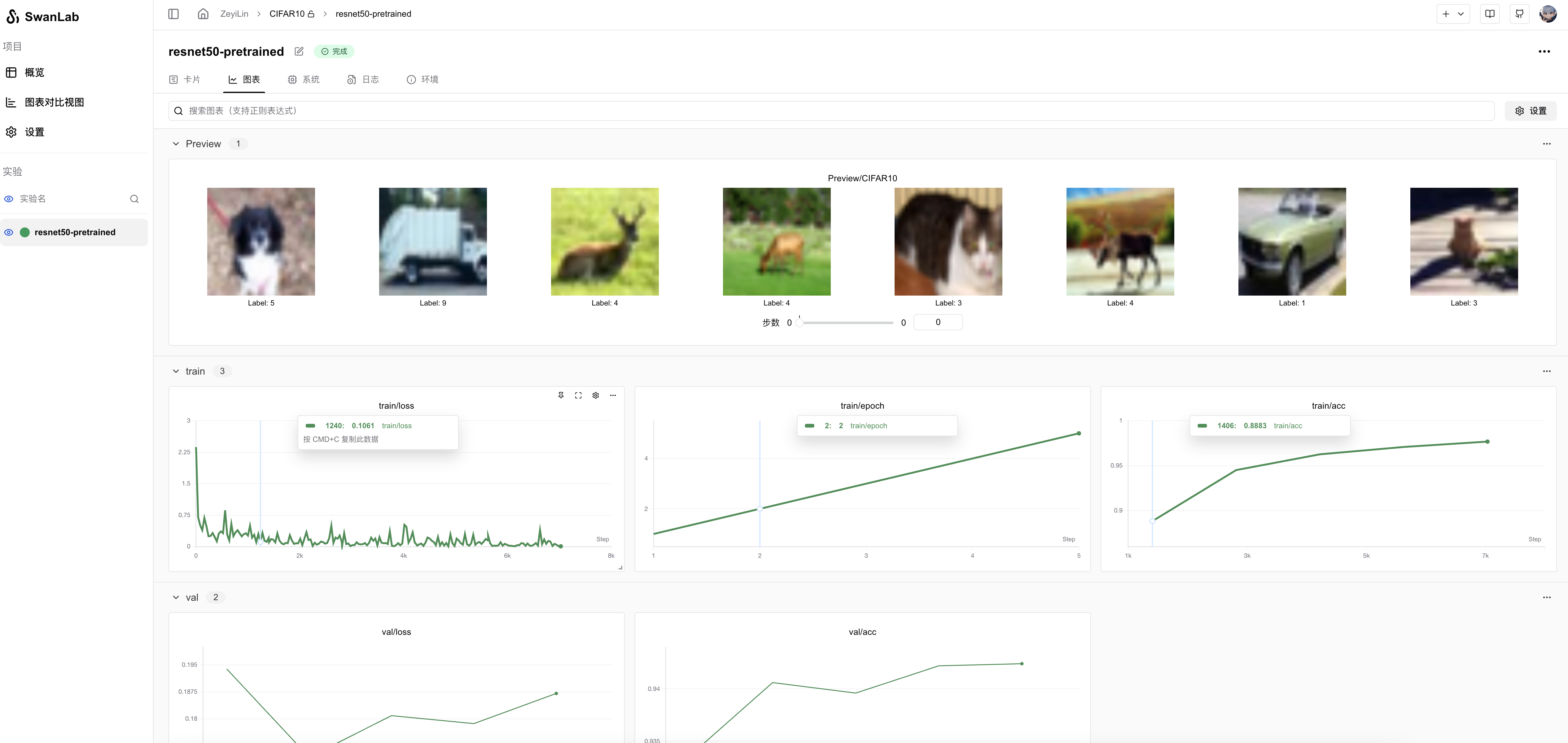
def log_images(loader, num_images=16):
"""Capture and visualize the first N images."""
images_logged = 0
logged_images = []
for images, labels in loader:
for i in range(images.shape[0]):
if images_logged < num_images:
logged_images.append(swanlab.Image(images[i], caption=f"Label: {labels[i]}", size=(128, 128)))
images_logged += 1
else:
break
if images_logged >= num_images:
break
swanlab.log({"Preview/CIFAR10": logged_images})
if __name__ == "__main__":
# Set random seed
set_seed(42)
# Configure device
try:
use_mps = torch.backends.mps.is_available()
except AttributeError:
use_mps = False
device = "cuda" if torch.cuda.is_available() else "mps" if use_mps else "cpu"
# Initialize SwanLab
run = swanlab.init(
project="CIFAR10",
experiment_name="resnet50-pretrained",
config={
"model": "Resnet50",
"optim": "Adam",
"lr": 1e-4,
"batch_size": 32,
"num_epochs": 5,
"train_dataset_num": 45000,
"val_dataset_num": 5000,
"device": device,
"num_classes": 10,
},
)
# Define transforms: resize and convert to 3 channels
transform = Compose([
ToTensor(),
Resize((224, 224), antialias=True), # ResNet expects 224x224 input
])
# Load datasets
dataset = CIFAR10(os.getcwd(), train=True, download=True, transform=transform)
train_dataset, val_dataset = utils.data.random_split(
dataset,
[run.config.train_dataset_num, run.config.val_dataset_num],
generator=torch.Generator().manual_seed(42)
)
train_loader = utils.data.DataLoader(train_dataset, batch_size=run.config.batch_size, shuffle=True)
val_loader = utils.data.DataLoader(val_dataset, batch_size=1, shuffle=False)
# Initialize model, loss, and optimizer
if run.config.model == "Resnet18":
from torchvision.models import resnet18
model = resnet18(pretrained=True)
model.fc = nn.Linear(model.fc.in_features, run.config.num_classes)
elif run.config.model == "Resnet34":
from torchvision.models import resnet34
model = resnet34(pretrained=True)
model.fc = nn.Linear(model.fc.in_features, run.config.num_classes)
elif run.config.model == "Resnet50":
from torchvision.models import resnet50
model = resnet50(pretrained=True)
model.fc = nn.Linear(model.fc.in_features, run.config.num_classes)
elif run.config.model == "Resnet101":
from torchvision.models import resnet101
model = resnet101(pretrained=True)
model.fc = nn.Linear(model.fc.in_features, run.config.num_classes)
elif run.config.model == "Resnet152":
from torchvision.models import resnet152
model = resnet152(pretrained=True)
model.fc = nn.Linear(model.fc.in_features, run.config.num_classes)
model.to(torch.device(device))
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=run.config.lr)
# Optional: Preview dataset images
log_images(train_loader, 8)
# Training loop
for epoch in range(1, run.config.num_epochs+1):
swanlab.log({"train/epoch": epoch}, step=epoch)
model.train()
train_correct = 0
train_total = 0
for iter, batch in enumerate(train_loader):
x, y = batch
x, y = x.to(device), y.to(device)
optimizer.zero_grad()
output = model(x)
loss = criterion(output, y)
loss.backward()
optimizer.step()
_, predicted = torch.max(output, 1)
train_total += y.size(0)
train_correct += (predicted == y).sum().item()
if iter % 40 == 0:
print(f"Epoch [{epoch}/{run.config.num_epochs}], Iteration [{iter + 1}/{len(train_loader)}], Loss: {loss.item()}")
swanlab.log({"train/loss": loss.item()}, step=(epoch - 1) * len(train_loader) + iter)
train_accuracy = train_correct / train_total
swanlab.log({"train/acc": train_accuracy}, step=(epoch - 1) * len(train_loader) + iter)
# Validation
model.eval()
correct = 0
total = 0
val_loss = 0
with torch.no_grad():
for batch in val_loader:
x, y = batch
x, y = x.to(device), y.to(device)
output = model(x)
val_loss += criterion(output, y).item()
_, predicted = torch.max(output, 1)
total += y.size(0)
correct += (predicted == y).sum().item()
accuracy = correct / total
avg_val_loss = val_loss / len(val_loader)
swanlab.log({"val/acc": accuracy, "val/loss": avg_val_loss}, step=(epoch - 1) * len(train_loader) + iter)Switching ResNet Models
The code supports the following ResNet variants:
- ResNet18
- ResNet34
- ResNet50
- ResNet101
- ResNet152
To switch models, modify the model parameter in config:
run = swanlab.init(
...
config={
"model": "Resnet50",
...
},
)- How does
configwork? 👉 Configure Experiments
Demo